Thesis Topics
Angebote für Bachelor/Master/Seminararbeiten und Studienprojekte.
Ball Erkennung
Ball detection is a key skill that Nao robots must master. In our team, a CNN is used for this purpose. This is to find the ball in small image sections (patches). Details can be found in the team report in chapter 4: https://www2.informatik.hu-berlin.de/~naoth/docs/publications/technical/naoth-report19.pdf There are a number of different aspects that can be examined in the context of a thesis. There are many different aspects that can be highlighted as part of a thesis. Here are a few ideas that can be implemented. Not all of them have to be dealt with within a thesis. Compare different...
Continue reading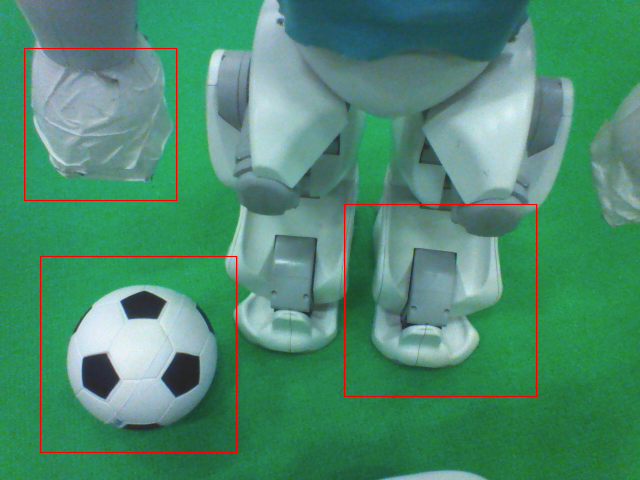
NAO - Aufstehbewegung
The ability of a humanoid robot to stand up again after a fall is fundamental for autonomy. In a scenatio like RoboCup, getting up can be a challenge. On the one hand, the robot must be ready to play ready to play again as quickly as possible, but there are also many factors that can prevent the robot from getting up and fast standing up. These include internal factors, such as worn joints, joint play, or overheated joints, and external factors, such as collision with other players or even "getting stuck" on the artificial turf. If it is detected that the robot has fallen down, then a...
Continue reading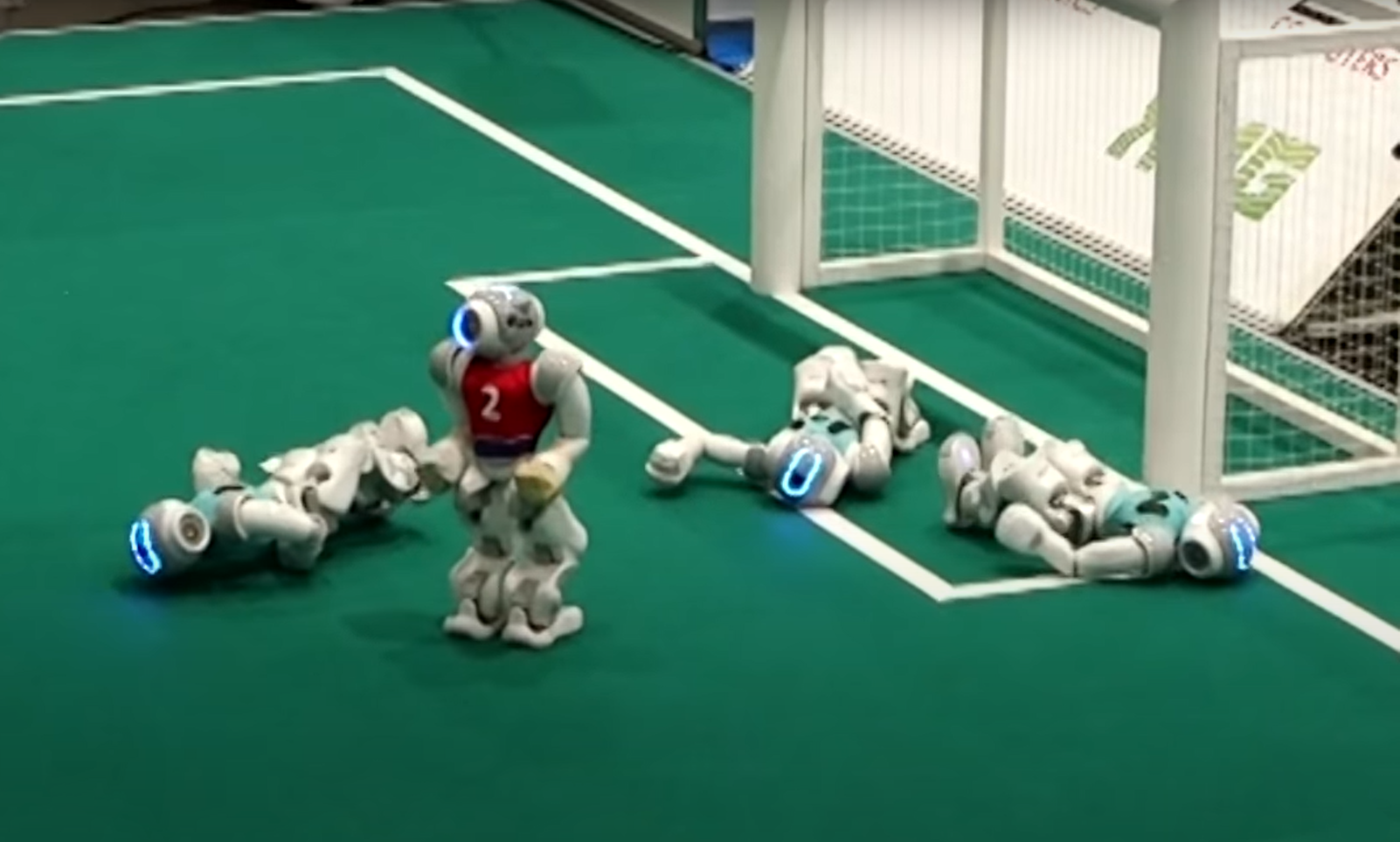
Themen für Seminar und Studienarbeiten
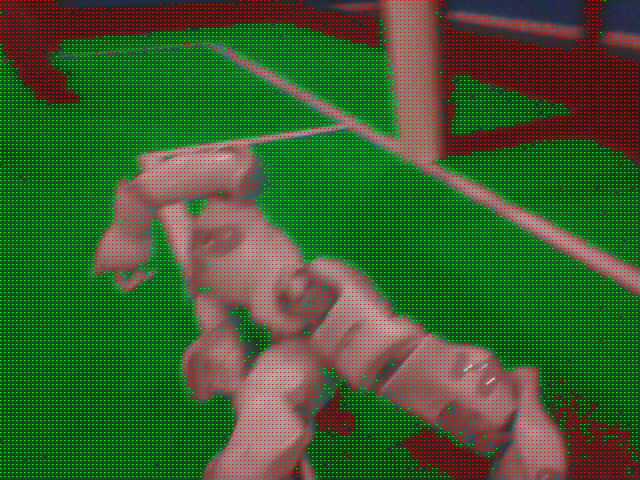
Green Detection
Detecting which pixels in the image belong to the playing field can make it easier and safer to detect other objects such as field lines, other robots and the ball. The field in RoboCup is green. So one way to recognize the field is to classify the pixels by their color, i.e. to recognize if they are green. However, this green detection depends strongly on the lighting and is also susceptible to shadows cast by the robots themselves. The task of this seminar project is to compare the green detection of 4 different RoboCup SPL teams. For this purpose the algorithms be implemented in Python...
Continue reading